นวัตกรรมสำหรับฟื้นฟูร่างกายที่พัฒนาด้วยการนำเทคโนโลยีหุ่นยนต์มาประยุกต์กับหลักการฟื้นฟูพื้นฐาน ช่วยให้บุคลากรด้านการฟื้นฟูร่างกายมีอุปกรณ์สนับสนุนการทำงานให้มีประสิทธิภาพมากขึ้น
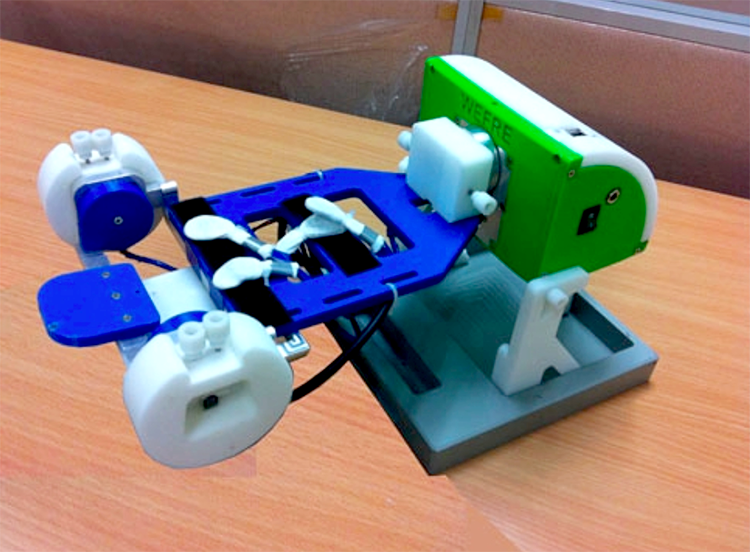
WEFRE Rehab System หรือเรียกย่อว่า “WEFRE” ระบบหุ่นยนต์เพื่อการฟื้นฟูข้อมือ แขนท่อนล่าง และข้อศอก (Wrist-Elbow-Forearm Robotic Economical Rehabilitation System) คือ นวัตกรรมสำหรับฟื้นฟูร่างกายที่พัฒนาด้วยการนำเทคโนโลยีหุ่นยนต์มาประยุกต์กับหลักการฟื้นฟูพื้นฐานที่มีอยู่ในปัจจุบัน วัตถุประสงค์หลักคือเพื่อเสริมให้บุคลากรด้านการฟื้นฟูร่างกายได้มีอุปกรณ์ที่ทำให้การทำงานมีประสิทธิภาพมากขึ้น โดยหลักของการออกแบบนวัตกรรมนี้คือ PEA – Portable-Enjoyable-Affordable ซึ่งหมายถึงนวัตกรรมนี้ต้องเป็นอุปกรณ์ที่เคลื่อนย้ายและติดตั้งได้ง่าย สร้างความเพลิดเพลินในขณะทำการฟื้นฟู และมีราคาที่เหมาะสม
คุณสมบัติและจุดเด่นของเทคโนโลยี
- ตัวขับเคลื่อนหลักคือมอเตอร์หนึ่งตัวพร้อมข้อต่อหนึ่งข้อต่อ
- ตัวหุ่นยนต์สามารถต่อเข้ากับส่วนรองรับแขนและส่วนรองรับมือเพื่อการฟื้นฟูส่วนของแขนได้ 3 ส่วน ได้แก่ การฟื้นฟูข้อมือ แขนท่อนล่าง และ ข้อศอก ตามลำดับ
- ส่วนรองรับแขนและส่วนรองรับมือได้รับการออกแบบมาให้รองรับแขนที่มีขนาดความยาวแตกต่างกันได้
- สามารถใช้ฟื้นฟูได้ทั้งแขนซ้ายและแขนขวา
- ผู้ใช้สามารถเลือกระยะเวลาสำหรับทำการฟื้นฟูในแต่ละครั้งได้ ตั้งแต่ 5 นาที จนถึง 1 ชั่วโมง
- ผู้ใช้สามารถเลือกโหมดของการฟื้นฟูได้ 5 แบบ ได้แก่ Passive, Passive Stretching, Initiating Active, Active Assisted และ Active Resisted
- เกมสำหรับการฟื้นฟูจะเปลี่ยนตามส่วนของแขนที่ต้องการทำการฟื้นฟู และโหมดของการฟื้นฟู วิธีการใช้งาน
- เชื่อมต่อระบบหุ่นยนต์เข้ากับเครื่องคอมพิวเตอร์ที่ลงโปรแกรมการใช้งานไว้
- เปิดการทำงานของระบบหุ่นยนต์และเปิดโปรแกรมใช้งานระบบหุ่นยนต์
- เลือกข้อกำหนดของการฟื้นฟูที่ต้องการ เช่น ส่วนของแขนที่ต้องการฟื้นฟู ระยะเวลาสำหรับการฟื้นฟู ความเร็วสำหรับการเคลื่อนไหว และโหมดของการฟื้นฟู
- กดปุ่ม “Start” เมื่อต้องทำการฟื้นฟูตามข้อกำหนดของการฟื้นฟูข้างต้นแล้วปิดโปรแกรมและระบบหุ่นยนต์หลังใช้งาน
- ระบบหุ่นยนต์สามารถฟื้นฟูได้หลายรูปแบบในระบบเดียว
- สามารถติดตั้ง เคลื่อนย้าย และใช้งานได้ง่าย
- ระบบมีประสิทธิภาพคุ้มราคา
สถานภาพทรัพย์สินทางปัญญา
- เลขที่คำขอสิทธิบัตรการออกแบบ เลขที่ 1102002003
- เลขที่คำขอสิทธิบัตรการประดิษฐ์ เลขที่ 1301006367
- ได้รับการจดอนุสิทธิบัตรหนึ่งรายการ ได้แก่ อนุสิทธิบัตร เลขที่ 8305
สถานภาพของผลงานวิจัย
ต้นแบบระดับ pilot scale
ความร่วมมือที่เสาะหา
เสาะหาผู้รับอนุญาตใช้สิทธิ
นักวิจัย
ดร.วินัย ชนปรมัตถ์
กลุ่มวิจัยปัญญาประดิษฐ์ (AINRG)
ทีมวิจัยการประมวลสัญญาณประสาท (NSP)
ศูนย์เทคโนโลยีอิเล็กทรอนิกส์และคอมพิวเตอร์แห่งชาติ (NECTEC)
สำนักงานพัฒนาวิทยาศาสตร์และเทคโนโลยีแห่งชาติ (สวทช.)