งานวิจัยนี้เป็นส่วนหนึ่งของแผนงานการพัฒนาระบบสารสนเทศ เพื่อการจัดการพื้นที่ภัยพิบัติอุทกภัยและแผ่นดินถล่ม โดยใช้การปฏิบัติการของระบบหุ่นยนต์แบบผสมผสานขั้นสูง ซึ่งเป็นความร่วมมือของ 3 ประเทศ ได้แก่ ไทย รัสเซีย และญี่ปุ่น โดยมีโจทย์วิจัยร่วมกันคือ ความต้องการในการแก้ปัญหาและหาแนวทางป้องกันเหตุการณ์ภัยพิบัติทางอุทกภัยและดินถล่ม ซึ่งแต่ละประเทศมีความพร้อมและประสบการณ์ในการพัฒนาเทคโนโลยี เพื่อการรับมือกับภัยพิบัติรูปแบบต่าง ๆ

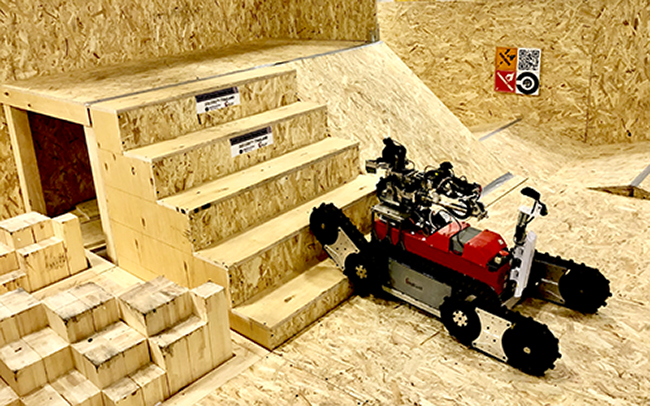
ทั้งนี้งานวิจัยนี้จึงอาศัยองค์ความรู้เหล่านี้ในการพัฒนาระบบเก็บข้อมูล สำหรับการจัดการพื้นที่ภัยพิบัติ ที่สามารถพัฒนาไปสู่มาตรฐานสากลได้ โดยทำการเก็บข้อมูลผ่านทางระบบหุ่นยนต์หลายประเภท ได้แก่ หุ่นยนต์ภาคพื้น โดรน และหุ่นยนต์ใต้น้ำ/เหนือผิวน้ำ เพื่อเพิ่มประสิทธิภาพในการเก็บข้อมูลให้ได้มากที่สุด และนำไปสร้าง Thematic Map ซึ่งภายหลังข้อมูลนี้จะไปรวมสร้างระบบสารสนเทศแบบ Multi-Layer Thematic Map สำหรับการวิเคราะห์พื้นที่ภัยพิบัติ การใช้ระบบหุ่นยนต์แบบผสมผสานนี้ประกอบด้วยข้อมูล Interaction Protocol การสร้าง Thematic Map และขั้นตอน Map Fusion ทั้งนี้ประเทศไทยจึงมีจุดมุ่งหมายในการพัฒนาหุ่นยนต์ทั้ง 3 รูปแบบ และระบบควบคุมทางไกล โดยหุ่นยนต์ภาคพื้น และหุ่นยนต์ใต้น้ำ/เหนือผิวน้ำสามารถทำงานได้แบบควบคุมระยะไกลหรือกึ่งอัตโนมัติ สามารถส่งข้อมูลแบบเรียลไทม์กลับมาที่สถานีควบคุม และทำการประมวลผลควบคู่กับ Landslide Model ที่อาศัยการตรวจวัดค่าคุณภาพของดิน ประเทศญี่ปุ่นจะพัฒนาระบบควบคุมหุ่นยนต์ ระบบ Graphical User Interfaces และระบบข้อมูลทางภูมิประเทศ และประเทศรัสเซียจะพัฒนาระบบจำลองหุ่นยนต์บนโปรแกรม Gazebo Simultaneous Localization และการทำ Mapping

ภาพรวมการทำงานของระบบหุ่นยนต์ ได้แก่ หุ่นยนต์ภาคพื้น โดรน และหุ่นยนต์ใต้น้ำ/เหนือผิวน้ำ