สวทช. เดินหน้าวิจัยพัฒนา ‘รถมินิบัสไฟฟ้าขับขี่อัตโนมัติ’ ยกระดับอุตสาหกรรมยานยนต์
For English-version news, please visit : NSTDA to develop self-driving minibus

ทุกวันนี้ความก้าวหน้าของอุตสาหกรรมยานยนต์ไม่ได้หยุดนิ่งเพียงการพัฒนา ‘รถไฟฟ้า’ เพื่อแก้ปัญหาด้านน้ำมันเชื้อเพลิง แต่บริษัทยักษ์ใหญ่ทั่วโลกต่างพุ่งทะยานสู่การสร้างนวัตกรรมยานยนต์สุดล้ำ ‘เทคโนโลยียานยนต์ขับขี่อัตโนมัติ หรือ Autonomous Vehicle’ เพื่อเพิ่มความปลอดภัยในการขับขี่บนท้องถนน ซึ่งที่ผ่านมา สำนักงานพัฒนาวิทยาศาสตร์และเทคโนโลยีแห่งชาติ (สวทช.) ร่วมกับสิริ เวนเจอร์ส และกรมวิทยาศาสตร์บริการ (วศ.) กระทรวงการอุดมศึกษาวิทยาศาสตร์ วิจัยและนวัตกรรม (อว.) ประสบความสำเร็จในการพัฒนาต้นแบบยานยนต์ขับขี่อัตโนมัติในรูปแบบรถกอล์ฟไฟฟ้าแบบ 6 ที่นั่ง
ล่าสุด สวทช. จับมือกับ บริษัทพนัส แอสเซมบลีย์ จำกัด ต่อยอดงานวิจัยพัฒนา ‘ต้นแบบรถโดยสารไฟฟ้าขนาดเล็กขับขี่อัตโนมัติ’ ภายใต้การสนับสนุนของหน่วยบริหารและจัดการทุนด้านการเพิ่มความสามารถในการแข่งขันของประเทศ (บพข.)
นายสุธี โอฬารฤทธินันท์ ทีมวิจัยเทคโนโลยีอัจฉริยะเพื่อการขนส่ง ศูนย์วิจัยเทคโนโลยีระบบรางและการขนส่งสมัยใหม่ สวทช. กล่าวว่า จากความสำเร็จในการพัฒนารถกอล์ฟขับขี่อัตโนมัติขนาด 6 ที่นั่ง ทีมวิจัยตั้งเป้าขยายผลสู่การพัฒนาต้นแบบรถโดยสารไฟฟ้าขนาดเล็กขับขี่อัตโนมัติ ระดับที่ 3 (รถยนต์ขับเคลื่อนโดยอัตโนมัติแต่มีผู้ขับขี่คอยเฝ้าระวังและแทรกแซงในกรณีที่ฉุกเฉิน) ซึ่งตัวรถบรรทุกผู้โดยสารได้ 15 ที่นั่ง ขับเคลื่อนด้วยไฟฟ้า วิ่งได้ความเร็วสูงสุด 35 กม./ชม. เป็นโครงการวิจัยร่วมกับบริษัท พนัส แอสเซมบลีย์ จำกัด ซึ่งมีความเชี่ยวชาญการผลิตรถบรรทุกเป็นทุนเดิม
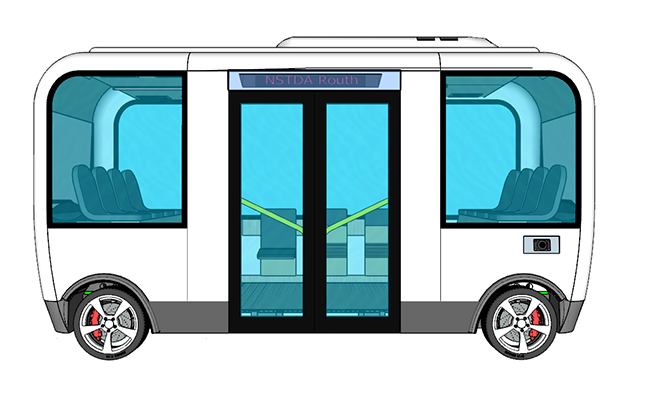
“ในการดำเนินโครงการ ทีมวิจัยได้พัฒนาระบบ 2 ส่วนหลักๆ คือ แพลตฟอร์มยานยนต์ขับเคลื่อนด้วยพลังงานไฟฟ้า (EV Platform) และระบบขับขี่อัตโนมัติ (Autonomous Vehicle) โดยในส่วนของ EV Platform มีการพัฒนาตั้งแต่เรื่องของการออกแบบโครงสร้างยานยนต์ไฟฟ้า การเลือกใช้วัสดุอุปกรณ์ การออกแบบวงจรไฟฟ้าเพื่อควบคุมการทำงาน รวมถึงการศึกษาเรื่องพลศาสตร์ยานยนต์ (Vehicle Dynamics) คือศึกษาสาเหตุและปัจจัยต่างๆ ที่มีผลต่อการเคลื่อนที่ของรถ เช่น โครงสร้างและน้ำหนักรถที่ออกแบบมามีผลต่อสมรรถนะการขับขี่หรือไม่ รถสามารถใช้ความเร็ว การเลี้ยว หรือเข้าโค้งต่างๆ ได้อย่างมีประสิทธิภาพและมีความปลอดภัยมากน้อยเพียงใด ส่วนระบบ Autonomous Vehicle เป็นการพัฒนาระบบควบคุมและสัญญาณให้มีความเหมาะสมมากขึ้น จากเดิมที่ใช้กับรถกอล์ฟมาสู่รถโดยสารขนาดเล็ก ต้องศึกษาทั้งการใช้เซนเซอร์ตรวจวัดสัญญาณ ระบบสั่งการ ระบบ Machine Learning รวมถึงระบบนำทางให้มีความเหมาะสมกับขนาดของรถ”
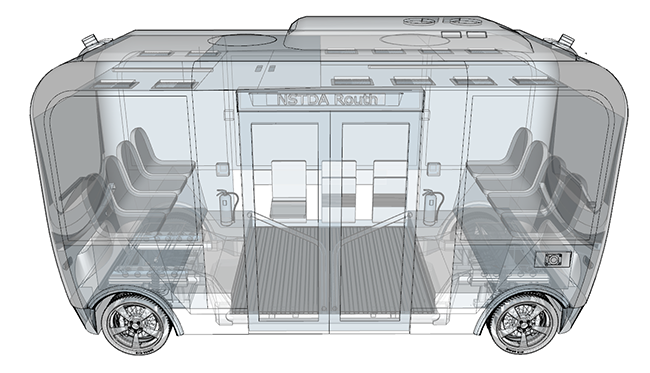
นายสุธี กล่าวว่า ในการพัฒนายานยนต์ขับขี่อัตโนมัติ ทีมวิจัยได้นำเทคโนโลยีคอมพิวเตอร์ช่วยในการคำนวณทางวิศวกรรม (Computer-Aided Engineering: CAE) มาใช้เป็นเครื่องมือสำคัญในการพัฒนาระบบ EV Platform เช่น การออกแบบโครงสร้างรถยนต์ การจำลองระบบควบคุม การขับเคลื่อนของรถในลักษณะต่างๆ เพื่อวิเคราะห์ผลการทำงานและปัญหาเบื้องต้นก่อนที่จะนำไปใช้สร้างต้นแบบรถจริง ขณะเดียวกันเมื่อทีมวิจัยสร้างต้นแบบรถมินิบัสไฟฟ้าเสร็จแล้ว เทคโนโลยีคอมพิวเตอร์ช่วยในการคำนวณทางวิศวกรรมยังมีบทบาทอย่างมากในการพัฒนาการเรียนรู้ของระบบ Autonomous Vehicle โดยใช้จำลองเส้นทางการเดินรถ และเหตุการณ์ต่างๆ เพื่อสร้างระบบการรู้จำและการตัดสินใจของระบบควบคุมอัตโนมัติให้ขับขี่ได้อย่างปลอดภัย ก่อนนำมาติดตั้งจริงในรถต้นแบบ
“ขณะนี้การดำเนินโครงการยังอยู่ระหว่างการออกแบบและคำนวณทางวิศวกรรม โดยคาดว่าจะสามารถผลิตต้นแบบรถมินิบัสไฟฟ้าขับขี่อัตโนมัติเสร็จภายในปี 2566 และจะทดสอบเดินรถในพื้นที่ปิด คืออุทยานวิทยาศาสตร์ประเทศไทย จ.ปทุมธานี เพื่อเก็บข้อมูลและประเมินสมรรถนะการขับขี่ของรถ รวมถึงปรับจูนระบบ EV Platform และ Autonomous ให้ทำงานร่วมกันได้อย่างมีประสิทธิภาพ ท้ายที่สุดหวังว่าองค์ความรู้ในการพัฒนาต้นแบบรถมินิบัสไฟฟ้าขับขี่อัตโนมัติที่พัฒนาขึ้นจะเป็นประโยชน์ต่ออุตสาหกรรมยานยนต์ของประเทศไทยในการนำไปใช้พัฒนาต่อยอดเชิงพาณิชย์ รวมถึงอาจนำไปใช้ทดสอบเป็นพาหนะเชื่อมโยงเครือข่ายขนส่งสาธารณะจากรถไฟฟ้าสายสีแดงมามหาวิทยาลัยธรรมศาสตร์ ศูนย์รังสิต เป็นต้น”
‘เทคโนโลยียานยนต์ขับขี่อัตโนมัติ’ นับเป็นนวัตกรรมแห่งอนาคตที่กำลังถูกจับตาและมีแนวโน้มความต้องของตลาดเพิ่มขึ้น การออกแบบและพัฒนาต้นแบบรถโดยสารไฟฟ้าขนาดเล็กที่มีการขับเคลื่อนแบบอัตโนมัติได้เองในประเทศไทยจึงเป็นสิ่งที่จำเป็นและสำคัญอย่างมากในการเร่งปรับตัวและก้าวให้ทันต่อการเปลี่ยนแปลงเทคโนโลยีอย่างรวดเร็ว รวมทั้งยังช่วยพัฒนายกระดับขีดความสามารถและศักยภาพด้านยานยนต์สมัยใหม่ให้กับอุตสาหกรรมในประเทศ